Описание исходной ситуации:
- есть набор размеченных данных с инерциальных датчиков. Разметка - позиции, активности и траектория человека во времени;
- данные с датчиков очень шумные, поэтому для оценки траектории мы не можем воспользоваться физическими уравнениями.
- во время передвижения человека на лифте или эскалаторе инерциальные датчики показывают то же самое, что и когда человек стоит, но передвижение происходит.
Цели проекта:
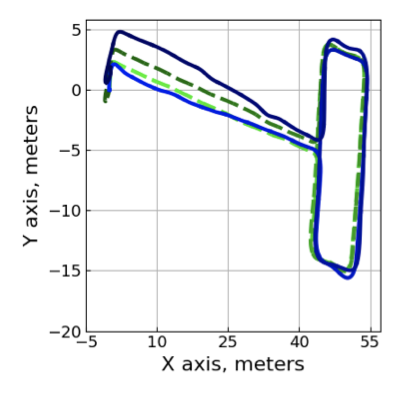
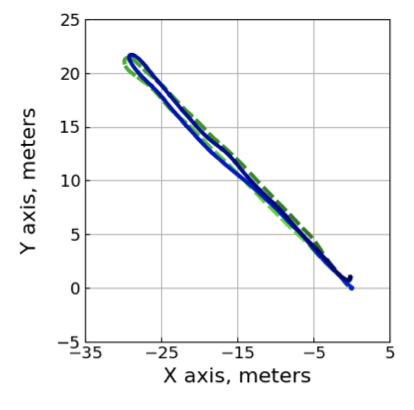
- построить алгоритм классификации активности и положения, а также оценки траектории человека в 3D при любой активности и любом положении телефона. Алгоритм включает в себя как DL часть, так и классические подходы к инерциальной навигации.
Решение MIL Team: решение задачи сегментации временных рядов с датчиков с помощью нейросети для моделирования частей траекторий. Классификация сегментов временных рядов нейросетью для распознавания активности и положения. Детекция смен активностей для определения активностей в лифте и на эскалаторе. Несколько классических и авторских алгоритмов предобработки данных.
Проблему с ориентацией мы решили путем внедрения новой системы координат, со-направленной с мировой по z-оси, с последующим выравниваем предсказаний за счет поворота в 2D-плоскости.
Проблему с зашумлением решали так: применяли нейросетевые подходы для очистки сигналов от излишних и иррелевантных атрибутов. В частности, мы применяли модели сегментации для построения предсказаний с учетом динамики на сегментах, а также генеративные подходы, которые строят сжатое и более информативное представление данных.
Для построения модели были использованы:
- Открытый датасет RuDaCop, собранный заказчиком;
- Открытый датасет RoNIN;
- Будет использован датасет, сборку которого организует команда MIL.
Результаты моделирования: under NDA
Заказчик: under NDA
Технологический стек: Python (PyTorch, quaternion), wandb для мониторинга экспериментов